DroneCore 1
10 times
faster time to market for UAS developers
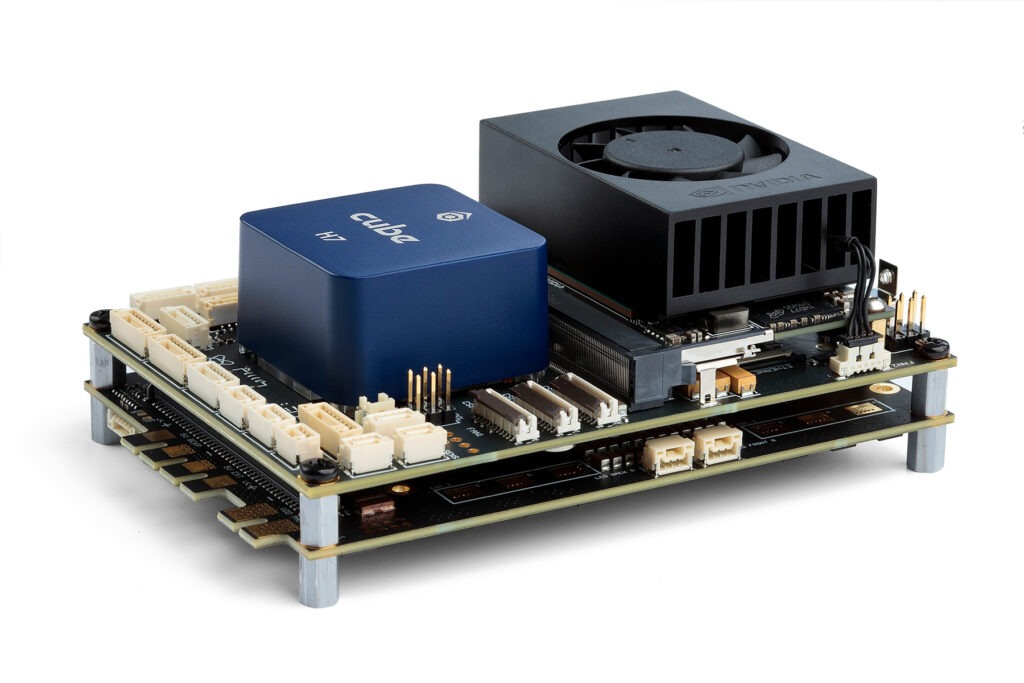
AI-driven autopilot with NVIDIA Jetson, Cube, and ESCs
Features
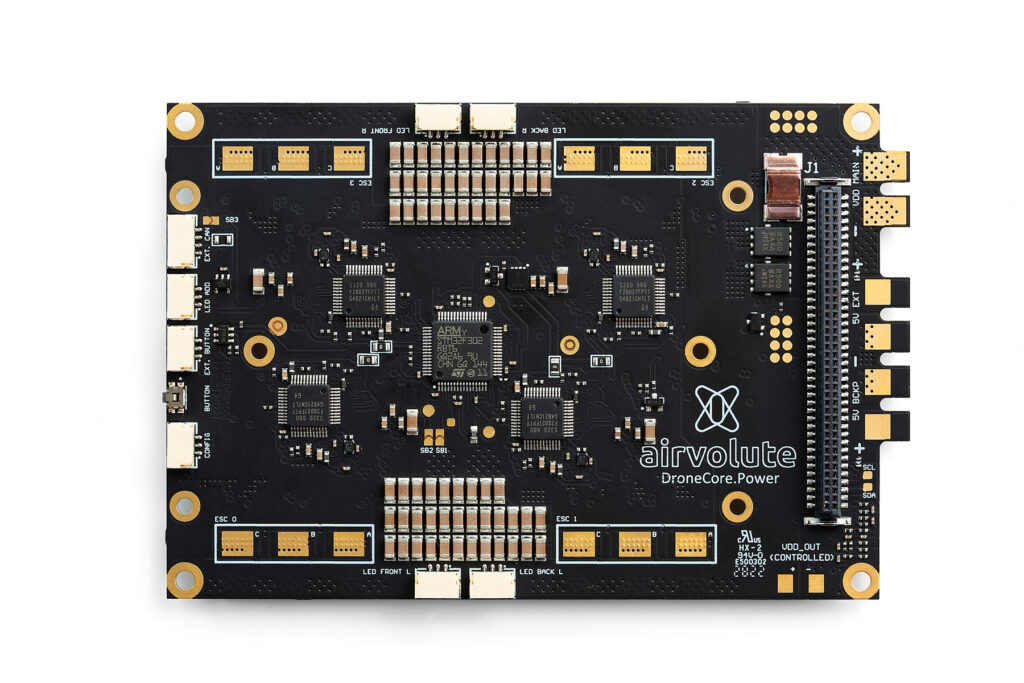
FOC-based ESCs
Proprietary highly optimized Electronic Speed Controllers suitable for quadcopter or octocopter
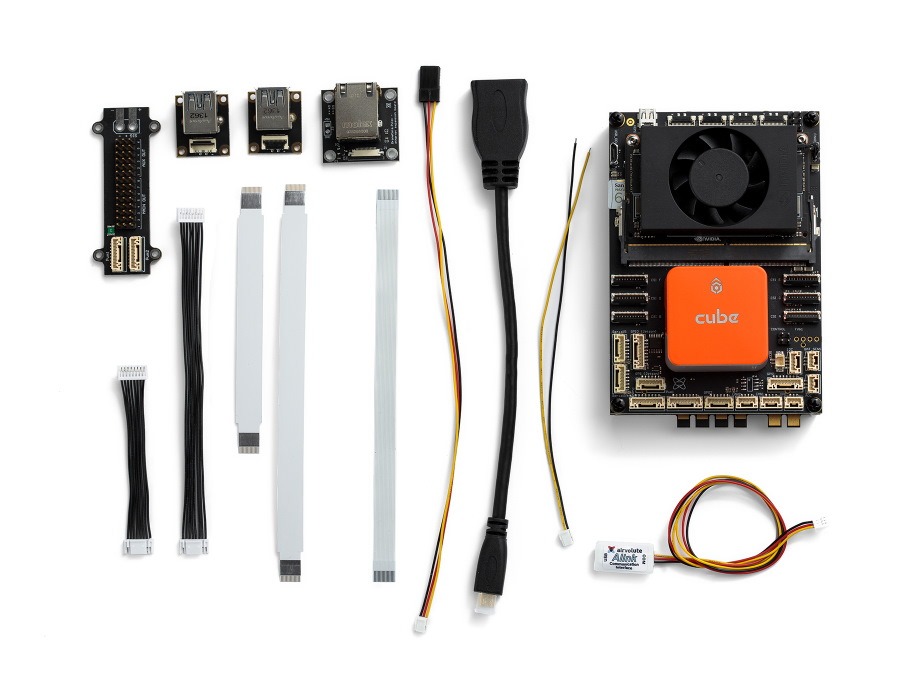
Various hardware configuration options
Jetson Xavier NX or Orin NX with support for various CSI and USB cameras (IMX477, OV9281, Flir Hadron, Intel Realsense, Ximea, Allied Vision, etc.)
Redundant FMU
Dual flight controller architecture for different use cases
- The Cube Pilot (Orange+ or Blue) as primary autopilot
- STM32H7 onboard FMU as secondary autopilot
Powerful SDK and easy-to-use API interface
- ROS2-based SDK ready to use for autonomous flights
- Unified Python API for various software layers (hardware access, localization, navigation, AI, etc.)
- Open Source architecture
Various vehicles support
Support for different types of drones like VTOL, copters, planes, rovers, etc.
{kind=link}